Stereo Camera Tracking
Particule filter tracking in 3D with 2 cameras
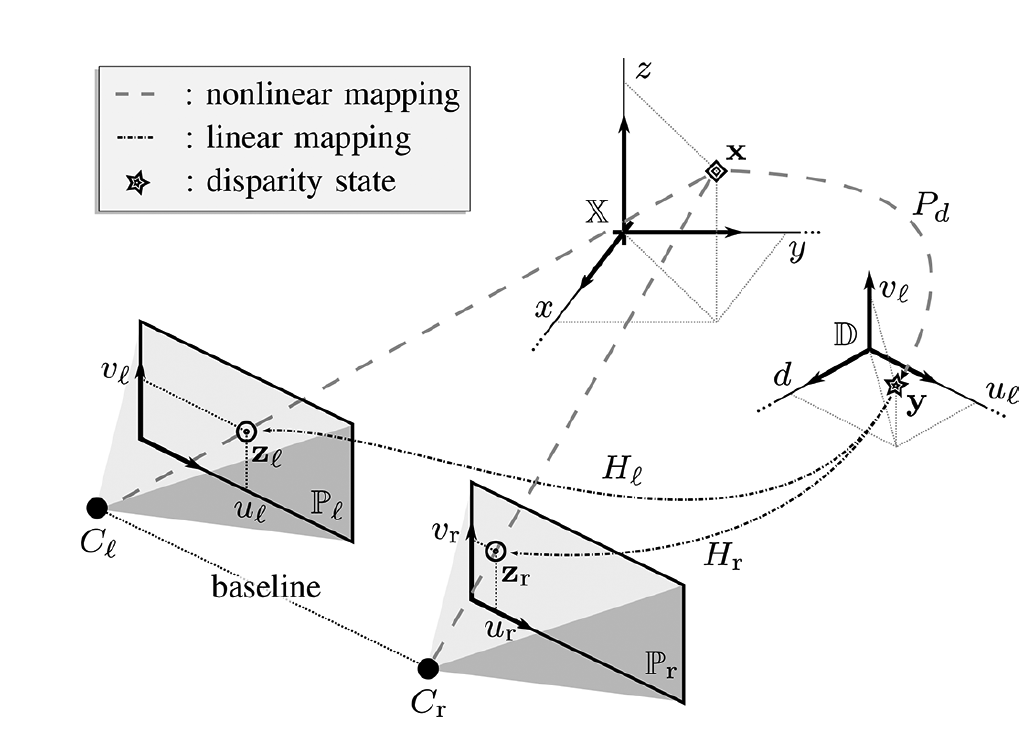
The objective is to recode and understand the algorithm explained in this article . The objective was to track on object in real world (3D space) with 2 cameras who are close to each other. The difficulty is that the classical gaussian assemption often used isn't acceptable in this case. The uncertainty of the object coordinates on the cameras are gaussians. Since the projection on the cameras are non-linear, the uncertainty in the real world is not gaussian anymore. We use the "disparity space" (picture bellow) in which the uncertainty is reasonably gaussian. With a correct mapping of the particule filter between those spaces we can track the target effectively. Here is the Code and some examples that we developpe.